
Distributed Gaussian Process Based Cooperative Visual Pursuit Control for Drone Networks
Abstract:
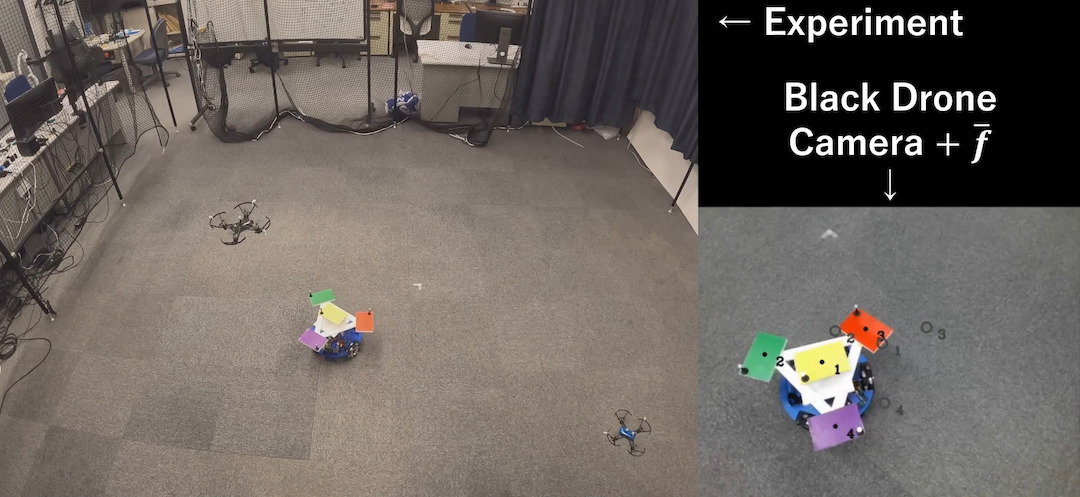
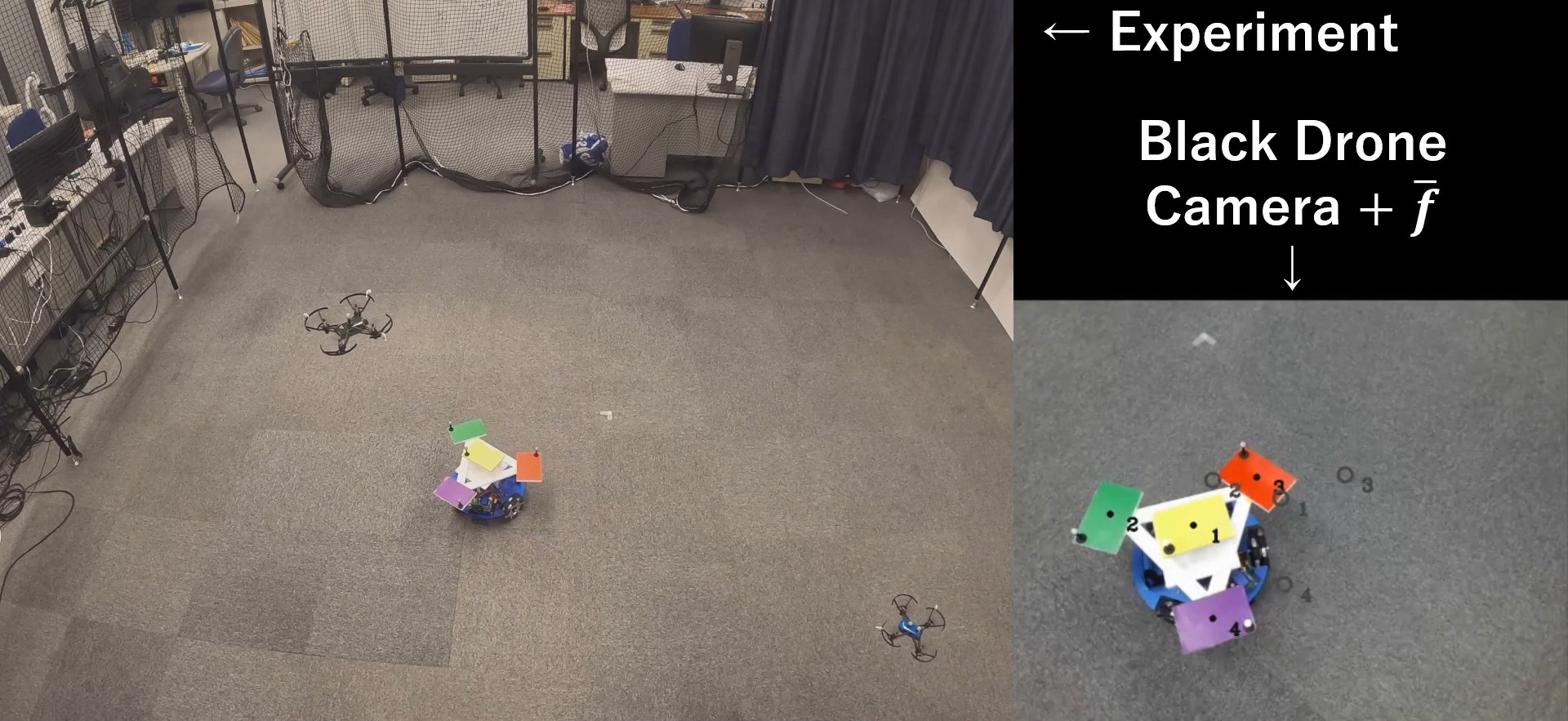
In this paper, we propose a control law for camera-equipped drone networks to pursue a target rigid body with unknown motion based on distributed Gaussian process. First, we consider the situation where each drone has its own dataset, and learns the unknown target motion in a distributed manner. Second, we propose a control law using the distributed Gaussian processes, and show that the estimation and control errors are ultimately bounded. Furthermore, the effectiveness of the proposed method is verified first in simulations and then in real-world experiments with actual drones.
Cite as:
M. Saito, J. Yamauchi, T. Fujinami, M. Omainska and M. Fujita, "Visual Pursuit Control based on Gaussian Processes with Switched Motion Trajectories", Proc. of the 9th IFAC Symposium on Mechatronic Systems (MS-MoViC), pp. 141-146, 2022.