
Cooperative Visual Pursuit Control with Learning of Target Motion via Distributed Gaussian Processes under Varying Visibility
Info:This paper has been resubmitted and is waiting for acceptance.
Abstract:
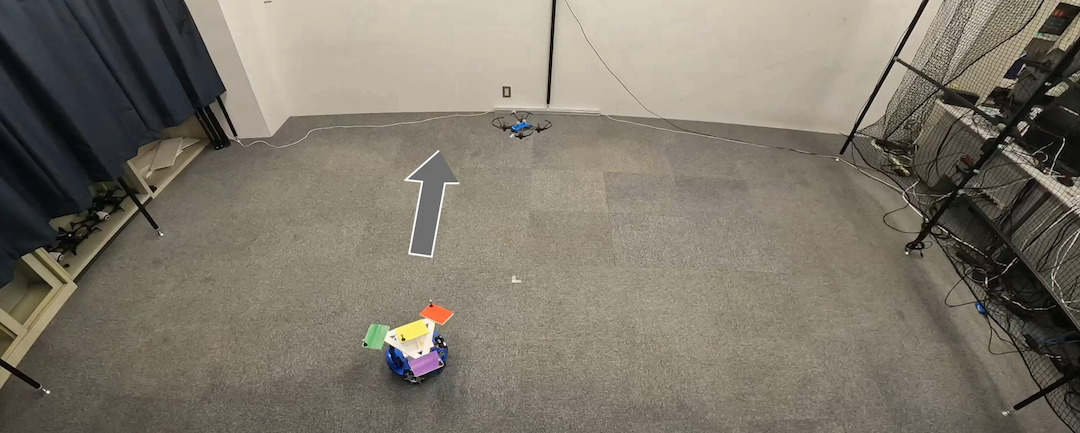
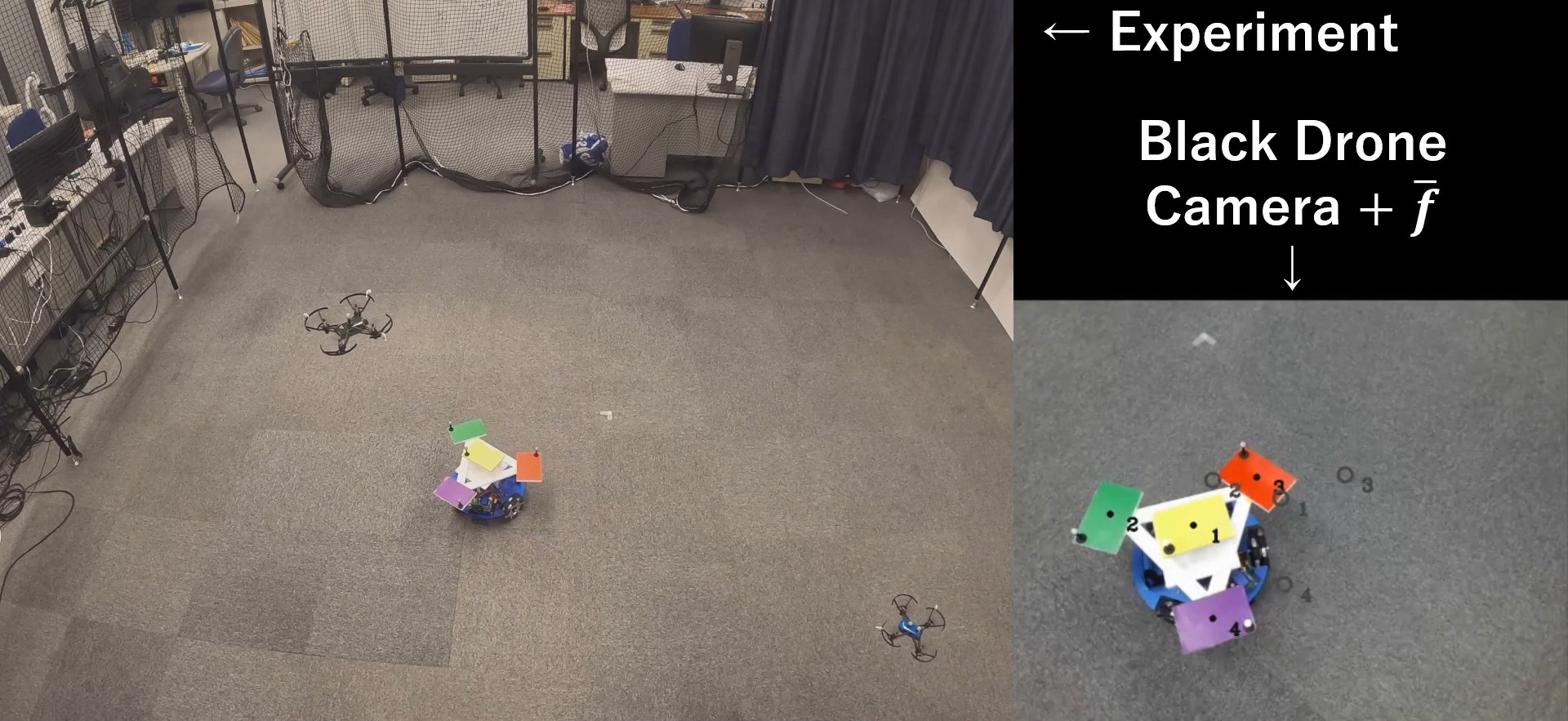
This paper considers vision-based cooperative control for robotic networks pursuing a target object based on distributed Gaussian processes. We consider a situation where networked multiple robots are learning unknown motion of the target as a Gaussian process from different datasets. In this scene, some robots may lose sight of the target due to the limited field of view. To address the issue, we introduce a notion of time varying visibility set. Then, we propose a control law based on a distributed Gaussian process model, which is constructed from the Gaussian process model of each robot. By applying the proposed law to the error system, it is shown that the estimation and control errors are ultimately bounded with probability. Finally, the effectiveness of the proposed method is verified by simulation.