
Gaussian Process-based Visual Pursuit Control with Automatic Gain Tuning
Abstract:
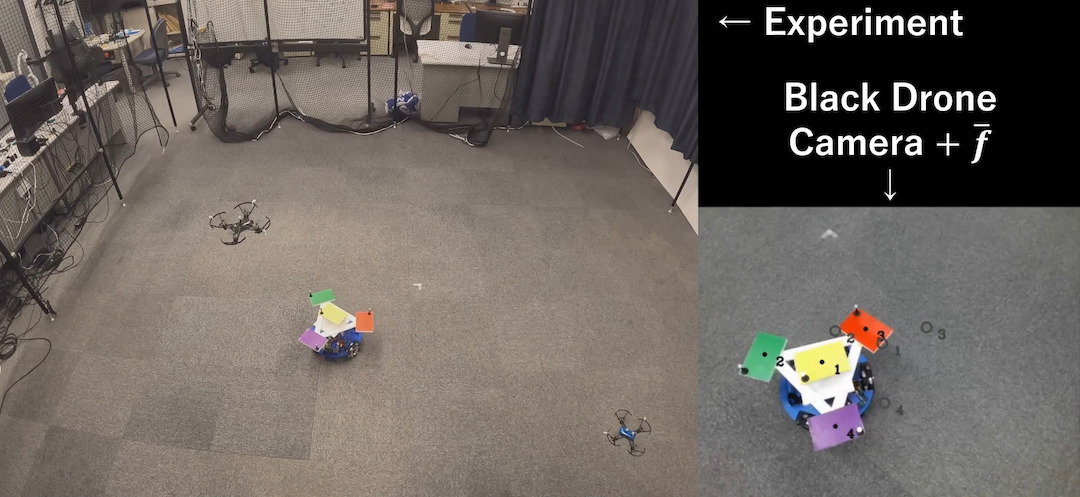
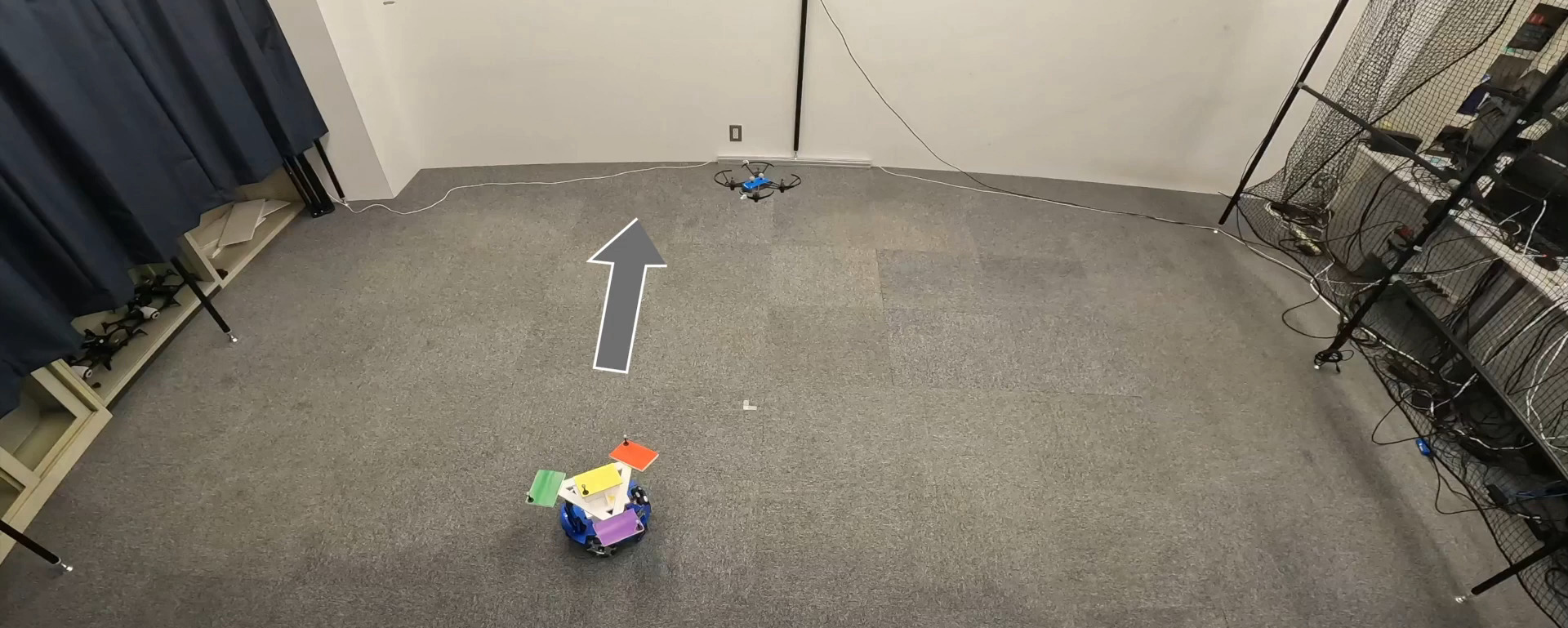
In this paper, we propose a vision-based pursuit control law with uncertainty estimates of the target motion by Gaussian process (GP) regression. We consider a situation where a robot equipped with a visual sensor pursues a target whose velocity is unknown. First, we introduce a GP-based target motion estimation. In addition, we propose an observer- based controller that automatically tunes the feedback gains by quantifying the upper bound on the uncertainty of the target motion with a GP estimate. Second, we provide the theoretical guarantee that the control error and the estimation error are uniformly ultimately bounded with high probability. Finally, we verify the effectiveness of the proposed controller via simulations and experiments.
Cite as:
T. Fujinami, J. Yamauchi, M. Omainska and M. Fujita, "Gaussian Process Based Visual Pursuit Control with Automatic Gain Tuning", Proc. of the 6th IEEE Conference on Control Technology and Applications (CCTA), pp. 1293-1299, Aug., 2022