

Visual Pursuit with Switched Motion Estimation and Rigid Body Gaussian Processes
Info:This paper has been submitted and is waiting for acceptance.
Abstract:
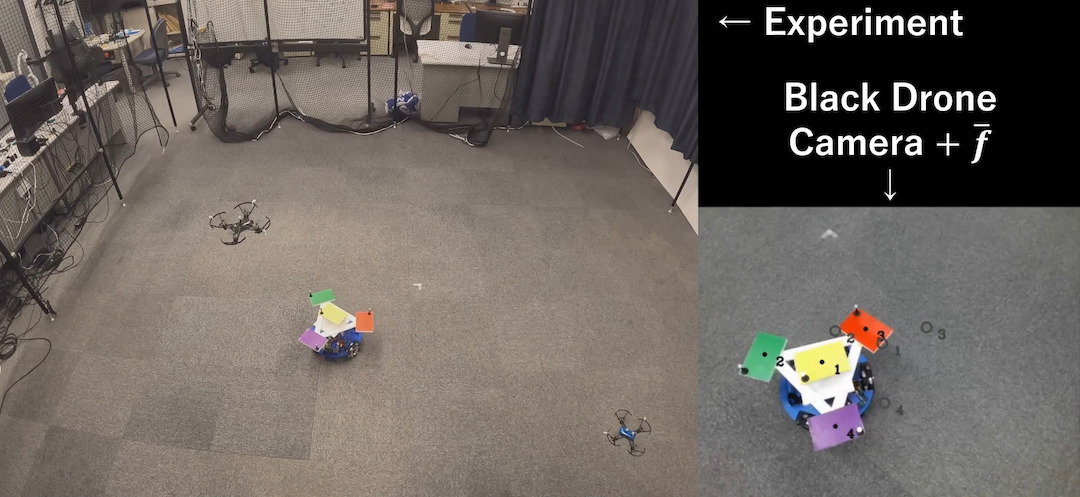
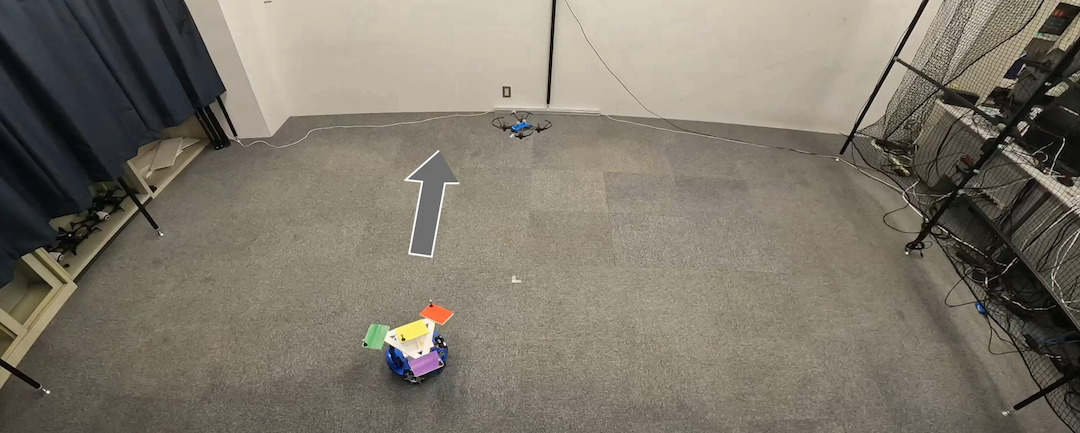
We present in this article a pursuit controller with simultaneous data-based 3D target motion prediction and switching estimation by a 2D camera when a moving target may switch between multiple motion patterns. The switching target motion is modelled by a new Gaussian Process model for rigid body motions that can predict velocity fields based on observed target motion data and an online switching estimator. We further prove that the proposed methods for motion prediction and visual pursuit ensure stability and demonstrate the increased performance of pursuing a target by a camera-equipped drone in a Digital Twin simulator.


Comments